Normal¶
This will show the Normal which is subcribed from topic (sensor_msgs::PointCloud2). The normal is assumed to have the features x,y,z,normal_x,normal_y,normal_z.
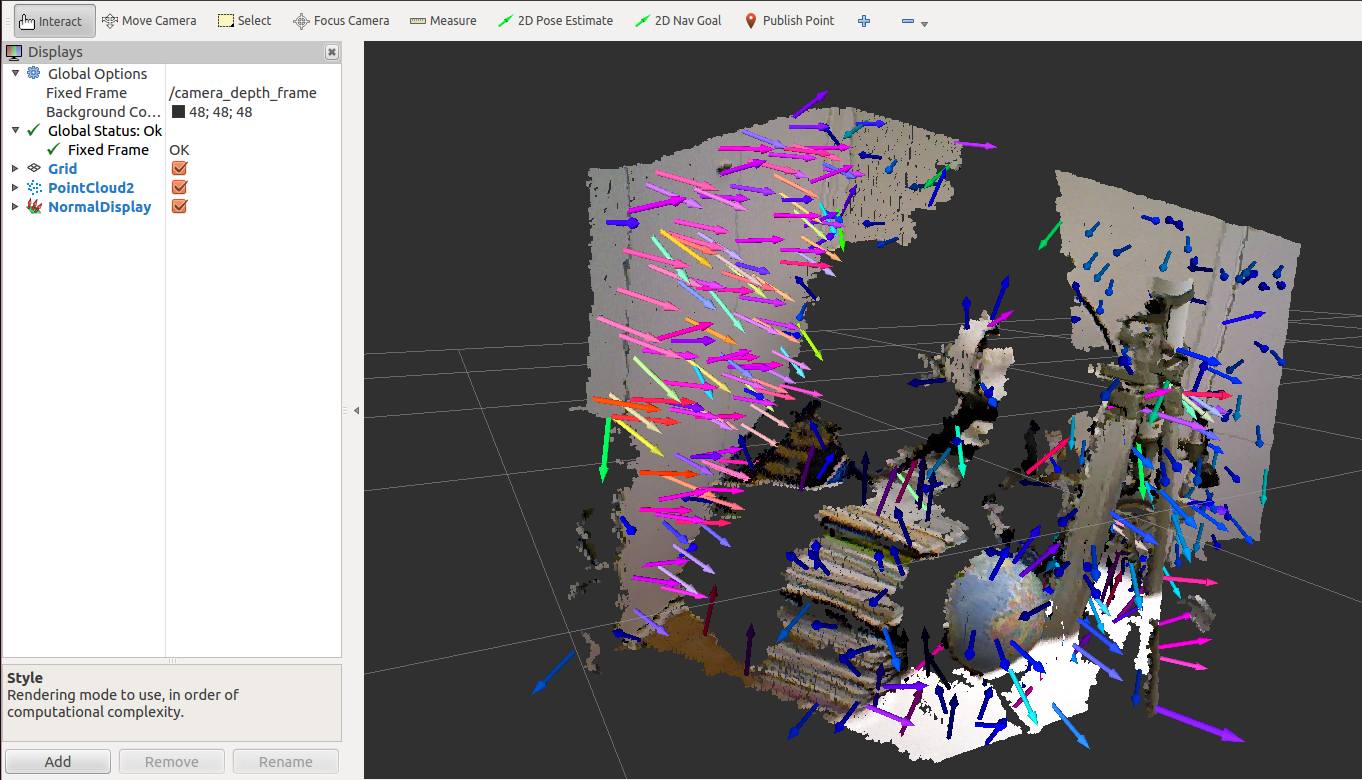 Normal Plugin
Normal Plugin
Samples¶
Plug the depth sensor which could be launched by openni.launch and execute below command.
roslaunch jsk_rviz_plugins normal_sample.launch