rosconsole_overlay_text.py¶
What is this?¶
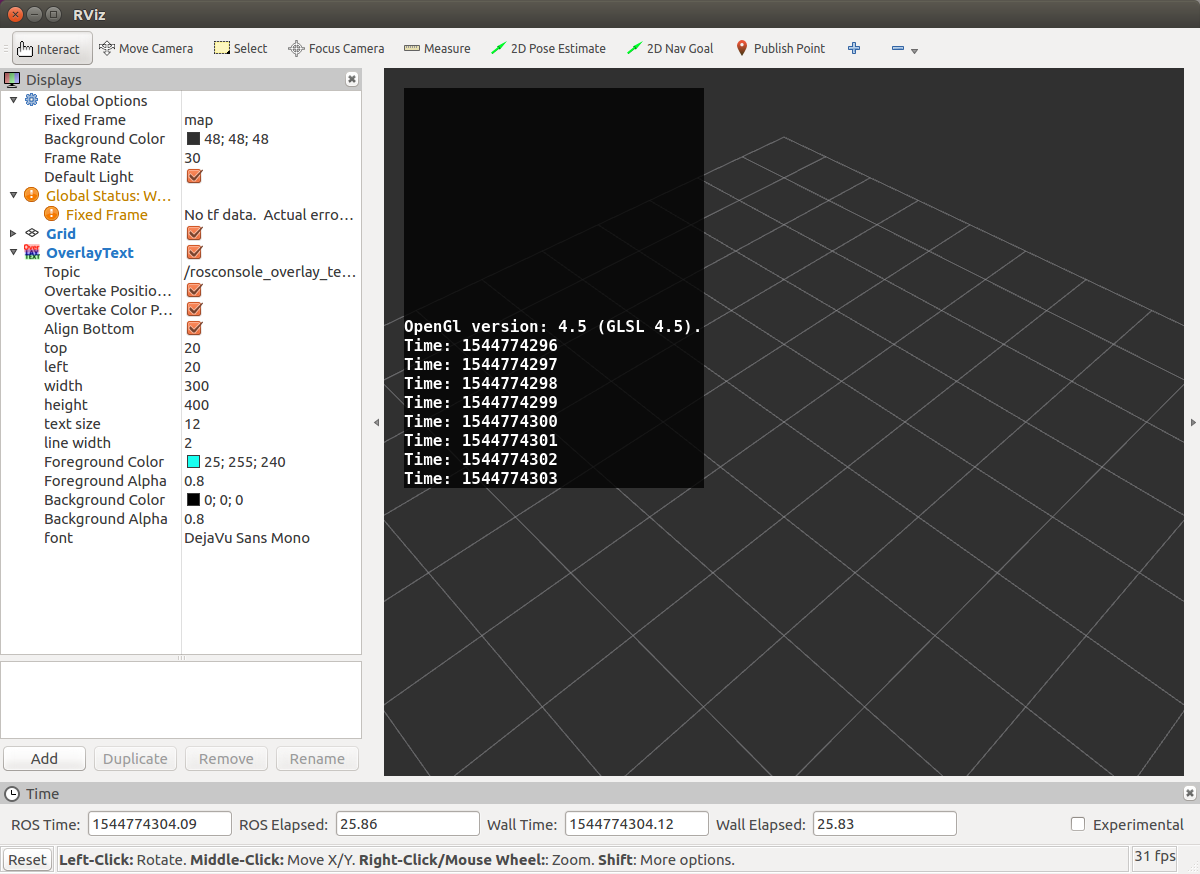
Publish message for overlaying ROS console output on rviz.
Subscribing Topic¶
/rosout(rosgraph_msgs/Log)ROS console output.
Publishing Topic¶
~output(jsk_rviz_plugins/OverlayText)Text message displayed on rviz with OverlayText plugin.
Parameters¶
~nodes(List of String, Default:[])Node names whose messages will be published. If an empty list is specified (default), then messages from all nodes will be published.
~nodes_regexp(String, Default:"")Regular expression used to filter unmatching nodes. If an empty string is specified (default), then messages from all nodes will be published.
Note that the combination of ~nodes and ~nodes_regexp is AND filter.
~ignore_nodes(List of String, Default:[])Node names whose messages won’t be published. This parameter takes priority over
~nodesornodes_regexp.~exclude_regexes(List of String, Default:[])Regular expressions used to exclude matching messages.
~line_buffer_length(Int, Default:100)Max number of messages stored in buffer.
~reverse_lines(Bool, default:True)If True, the order of stored messages in the buffer will be reversed.
Sample¶
roslaunch jsk_rviz_plugins overlay_sample.launch